 Robot menggunakan peta untuk berkeliling seperti manusia. Faktanya, robot tidak dapat bergantung pada GPS selama pengoperasian di dalam ruangan. Selain itu, GPS tidak cukup akurat selama pengoperasian di luar ruangan karena meningkatnya permintaan untuk pengambilan keputusan. Inilah alasan mengapa perangkat ini bergantung pada Pelokalan dan Pemetaan Secara Bersamaan. Ini juga dikenal sebagai SLAM. Mari cari tahu lebih lanjut tentang pendekatan ini.
Robot menggunakan peta untuk berkeliling seperti manusia. Faktanya, robot tidak dapat bergantung pada GPS selama pengoperasian di dalam ruangan. Selain itu, GPS tidak cukup akurat selama pengoperasian di luar ruangan karena meningkatnya permintaan untuk pengambilan keputusan. Inilah alasan mengapa perangkat ini bergantung pada Pelokalan dan Pemetaan Secara Bersamaan. Ini juga dikenal sebagai SLAM. Mari cari tahu lebih lanjut tentang pendekatan ini.
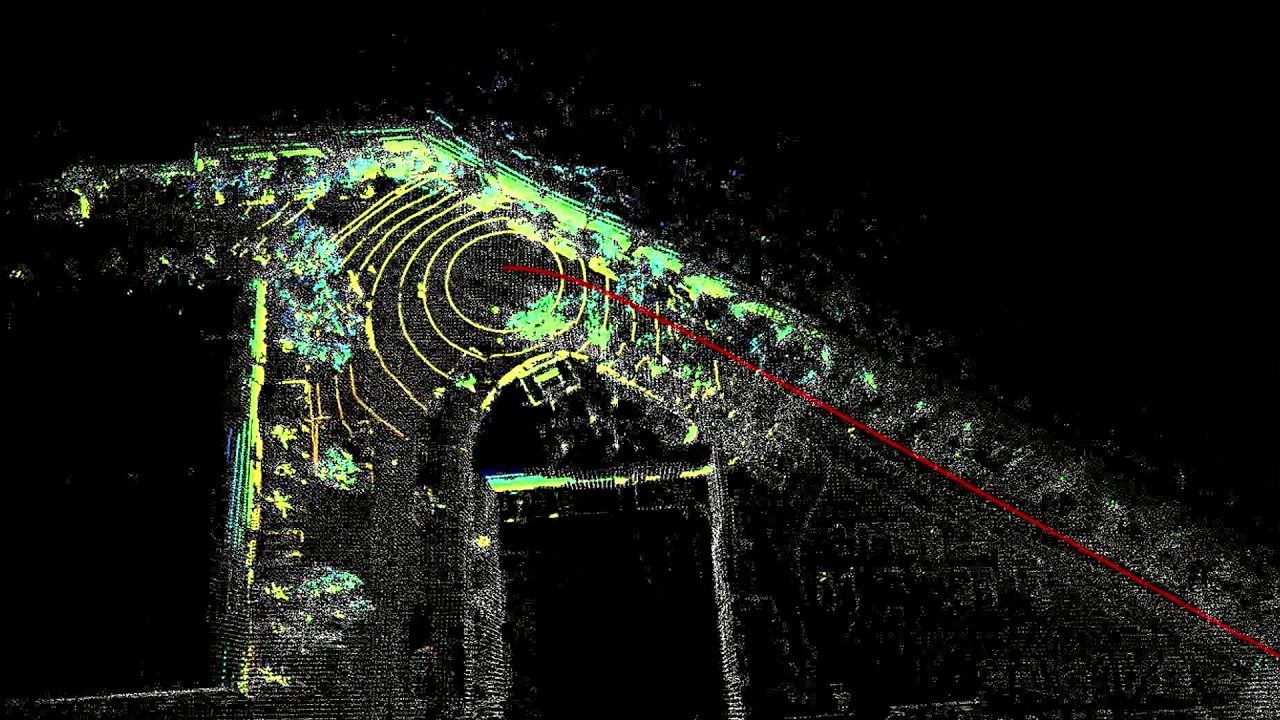
Dengan bantuan SLAM, robot dapat membuat peta ini saat beroperasi. Selain itu, ini memungkinkan mesin ini untuk melihat posisinya melalui penyelarasan data sensor.
Meski terlihat cukup sederhana, prosesnya melibatkan banyak tahapan. Robot harus memproses data sensor dengan bantuan banyak algoritma.
- Penyelarasan Data Sensor
Komputer mendeteksi posisi robot dalam bentuk titik timestamp di garis waktu peta. Faktanya, robot terus mengumpulkan data sensor untuk mengetahui lebih banyak tentang lingkungannya. Anda akan terkejut mengetahui bahwa mereka menangkap gambar dengan kecepatan 90 gambar per detik. Inilah cara mereka menawarkan presisi.
- Estimasi Gerak
Selain itu, odometri roda mempertimbangkan rotasi roda robot untuk mengukur jarak yang ditempuh. Demikian pula, unit pengukuran inersia dapat membantu komputer mengukur kecepatan. Aliran sensor ini digunakan untuk mendapatkan perkiraan yang lebih baik tentang pergerakan robot.
- Registrasi Data Sensor
Registrasi data sensor terjadi antara peta dan pengukuran. Misalnya, dengan bantuan NVIDIA Isaac SDK, para ahli dapat menggunakan robot untuk tujuan pencocokan peta. Ada algoritma dalam SDK yang disebut HGMM, yang merupakan kependekan dari Hierarchical Gaussian Mixture Model. Algoritma ini digunakan untuk menyelaraskan sepasang awan titik.
Pada dasarnya, filter Bayesian digunakan untuk memecahkan lokasi robot secara matematis. Ini dilakukan dengan bantuan perkiraan gerakan dan aliran data sensor.
- GPU dan Perhitungan Sepersekian Detik
Menariknya, perhitungan pemetaan dilakukan hingga 100 kali per detik berdasarkan algoritma. Dan ini hanya mungkin dalam waktu nyata dengan kekuatan pemrosesan GPU yang menakjubkan. Tidak seperti CPU, GPU dapat bekerja hingga 20 kali lebih cepat sejauh menyangkut perhitungan ini.
- Odometri Visual dan Lokalisasi
Odometri Visual dapat menjadi pilihan ideal untuk mengetahui lokasi robot dan orientasinya. Dalam hal ini, satu-satunya masukan adalah video. Nvidia Isaac adalah pilihan ideal untuk ini karena kompatibel dengan odometri visual stereo, yang melibatkan dua kamera. Kamera ini bekerja secara real-time untuk melihat lokasi. Kamera ini dapat merekam hingga 30 frame per detik.
Singkat cerita, ini adalah sekilas tentang Lokalisasi dan Pemetaan Simultan. Semoga artikel ini membantu Anda mendapatkan pemahaman yang lebih baik tentang teknologi ini. Semoga bermanfaat dan menambah wawasan teknologi Anda !!